






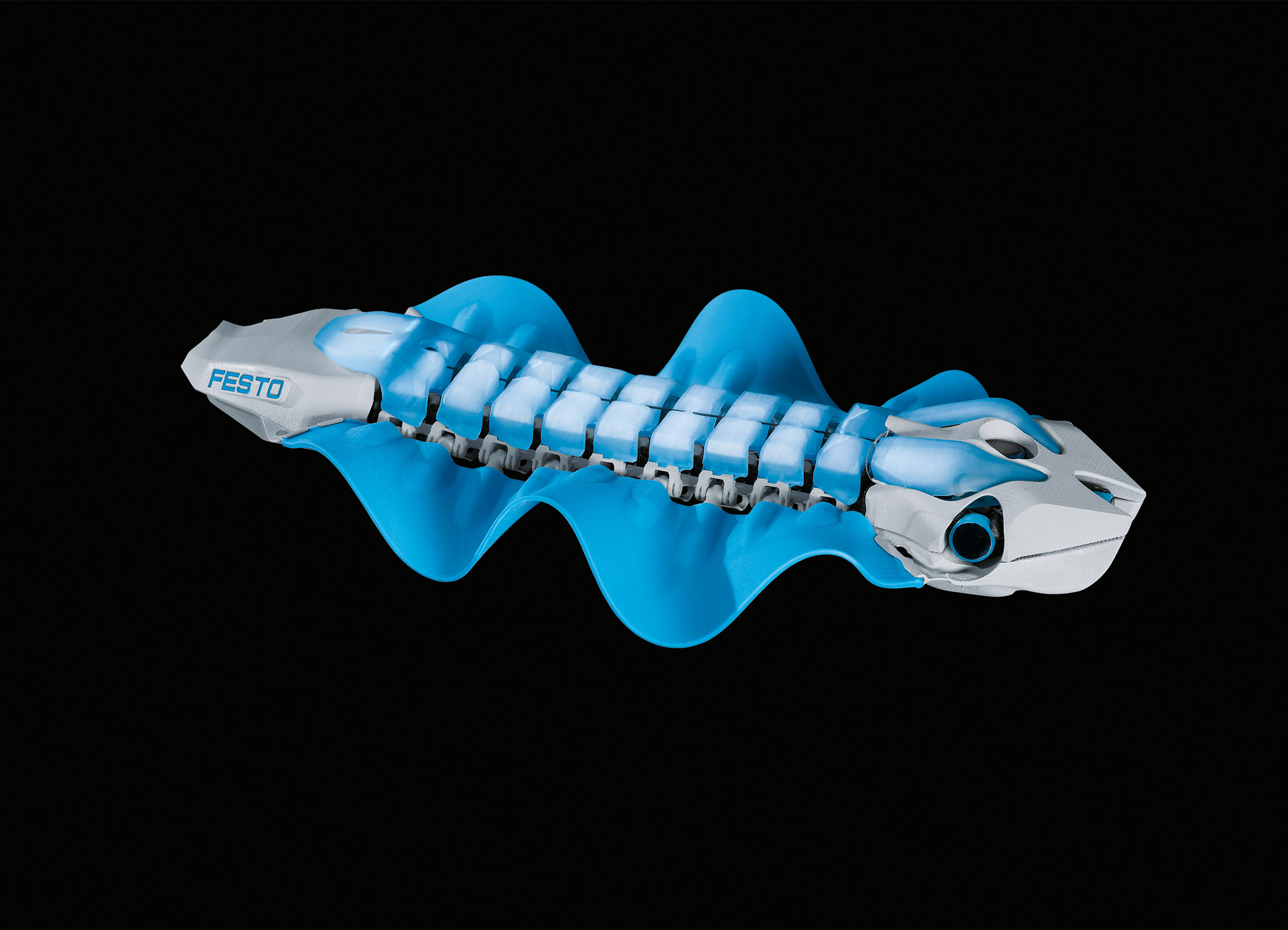
Die Natur lehrt uns eindrucksvoll, wie die optimalen Antriebssysteme für bestimmte Schwimmbewegungen aussehen. Für den BionicFinWave, den Festo auf der Achema 2018 erstmals präsentierte, hat sich das Bionik-Team von der undulierenden Flossenbewegung inspirieren lassen, die unter anderem vom freilebenden Meeresstrudelwurm oder dem Sepia genutzt wird. Mit dieser Antriebsform manövriert sich der Unterwasserroboter selbstständig durch ein Rohrsystem aus Acrylglas. Das Projekt gibt Impulse zur künftigen Arbeit mit autonomen Robotern in der Prozessindustrie.
Mit dem bionischen Technologieträger setzt das Unternehmen einmal mehr einen Impuls für die zukünftige Arbeit mit autonomen Robotern und neuen Antriebstechnologien im Einsatz in flüssigen Medien. Denkbar wäre es, Konzepte wie den BionicFinWave für Aufgaben wie Inspektionen, Messreihen oder Datensammlungen weiterzuentwickeln – etwa für die Wasser- und Abwassertechnik oder andere Gebiete der Prozessindustrie. Zudem lassen sich die im Projekt gewonnenen Erkenntnisse für die Herstellungsverfahren von Softrobotik-Komponenten nutzen.
Schwimmen wie das natürliche Vorbild
Die Längsflossen von Meeresstrudelwurm und Sepia verlaufen von Kopf bis Schwanz, entweder am Rücken, am Bauch oder an beiden Seiten des Körpers. Um sich fortzubewegen, erzeugen die Fische mit den Flossen eine durchgängige Welle, die sich entlang ihrer gesamten Länge voranschiebt. Diese so genannte Undulation drückt das Wasser nach hinten, wodurch ein Vorwärtsschub entsteht. Mit diesem Prinzip manövriert sich auch der BionicFinWave vorwärts oder rückwärts.
Damit konnte das Unternehmen einen Flossenantrieb technisch umsetzen, der sich besonders für eine langsame und präzise Fortbewegung eignet und Wasser weniger aufwirbelt als beispielsweise ein konventioneller Schraubenantrieb. Während er durch das Rohrsystem schwimmt, kann der autonome Unterwasserroboter über Funk mit der Außenwelt kommunizieren und Daten – wie die erfassten Sensorwerte für Temperatur und Druck – an ein Tablet übertragen.
Flexible Silikonflossen aus einem Guss
Die beiden Seitenflossen des 370 mm langen BionicFinWave sind komplett aus Silikon gegossen und kommen ohne Verstrebungen oder andere Stützelemente aus. Dadurch sind sie äußerst nachgiebig und können so die flüssigen Wellenbewegungen der biologischen Vorbilder naturgetreu umsetzen. Für die Bewegung sind die beiden Flossen links und rechts jeweils an neun kleinen Hebelarmen befestigt, die einen Ausschlagwinkel von 45° haben. Sie werden von zwei Servomotoren angetrieben, die im Körper des Unterwasserroboters sitzen. Zwei anliegende Kurbelwellen übertragen die Kraft auf die Hebel, sodass sich die beiden Flossen individuell bewegen lassen. Dadurch können sie unterschiedliche Wellenmuster generieren. Um eine Kurven zu schwimmen, bewegt sich beispielsweise die äußere Flosse schneller als die innere – vergleichbar mit den Ketten eines Baggers.
Nach oben oder unten schwimmt der BionicFinWave, indem er seinen Körper in die gewünschte Richtung biegt. Damit die Kurbelwellen entsprechend flexibel sind, sitzt zwischen jedem Hebelsegment ein Kardangelenk. Die Kurbelwellen wurden inklusive der Gelenke und dem Pleuel aus Kunststoff in einem Stück mit 3D-Druck-Verfahren gefertigt.
Optimal ausgelegter Körper mit integrierter Bordelektronik
Auch die restlichen Körperelemente des 430 g leichten BionicFinWave sind 3D-gedruckt, was ihre komplexen Geometrien erst ermöglicht. Mit ihren Hohlräumen fungieren sie als Auftriebskörper. Gleichzeitig ist hier auf engstem Raum die gesamte Steuerungs- und Regelungstechnik wasserdicht und sicher verbaut. Ein Drucksensor sowie Ultraschallsensoren messen permanent die Abstände zu den Wänden sowie die Tiefenposition im Wasser und vermeiden so Kollisionen mit dem Rohrsystem. Voraussetzung für dieses autonome und sichere Navigieren war die Entwicklung von kleinen, leistungsfähigen sowie wasserdichten bzw. ‑unempfindlichen Komponenten, die mit der entsprechenden Software koordiniert und geregelt werden können.

